
Semruk 2
Yıldız Roket Takımı, Teknofest 2019 Roket Yarışmasına Alçak İrtifa kategorisinde Semruk-2 roketi ile katılım göstermiştir. Roketimizin tasarımı tamamlanmıştır ancak üretimi, takım üyelerinin mutlak çoğunluğunun staj, yaz okulu ve bazı üyelerimizin mezuniyetleri dolayısıyla aksama göstermiştir. Bu parametreler göz önünde bulundurularak takımımız, tüm sponsorluk çalışmalarını yüksek irtifa kategorisinde yarışan STR-02 roketine aktarmış, bununla birlikte Semruk-2 projesine devam etmiştir. Maalesef Semruk-2 roketimiz, belirtilen sebepler dolayısıyla GTR/AHR sürecinde kritik parçaların üretimlerinin yetişmemesi sebebiyle yarışmadan elenmiştir.
.png)
.png)
Roketimizin bazı teknik bilgileri aşağıdaki tablolarda verilmiştir:
|
|
Ölçü |
|
Boy (metre): |
1,97 |
|
Çap (metre): |
0,17 |
|
Roketin Kuru Ağırlığı (kg.): |
15,422 |
|
Yakıt Kütlesi ( kg.): |
1,864 |
|
Motorun Kuru Ağırlığı (kg.): |
1,584 |
|
Faydalı Yük Ağırlığı (kg.): |
4 |
|
Toplam Kalkış Ağırlığı (kg.): |
17,286 |
|
İtki Tipi: |
Katı Yakıt |
|
|
Ölçü |
|
Kalkış İtki/Ağırlık Oranı: |
6,14 |
|
Rampa Hızı (m/s): |
25,8 |
|
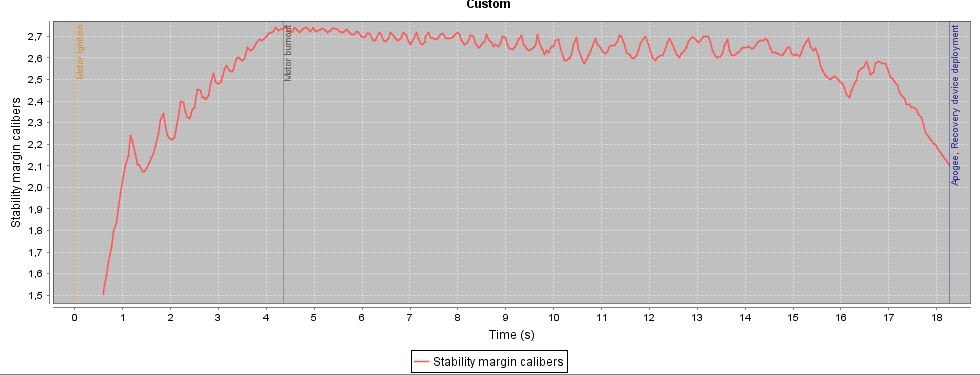
Yanma Boyunca En Az Statik Denge Değeri: |
1,74 |
|
En Büyük İvme (g): |
6,27 |
|
En Yüksek Hız (m/s & M): |
180 |
|
Belirlenen İrtifa (m): |
1500 |
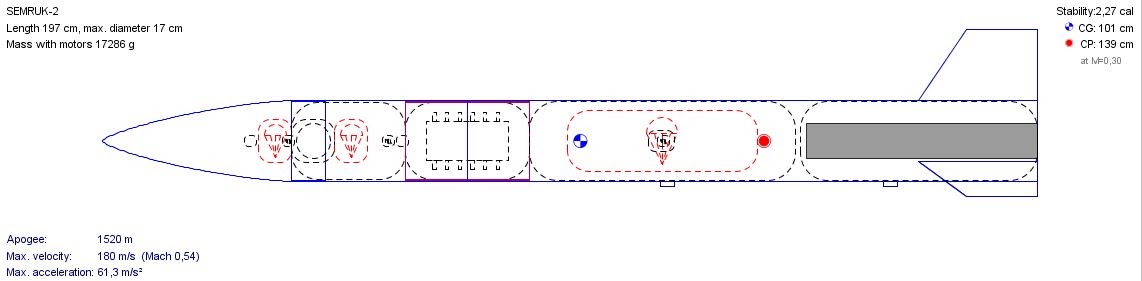
.png)
Semruk-2 roketinin OpenRocket ile gösterimiSemruk-2 roketinin ebatları
1. İTKİ
1.1 Motor Konfigürasyonları ve Motor Bölmesi
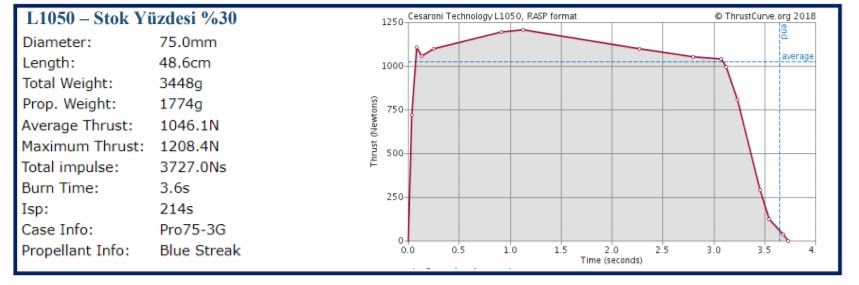
- Roket için seçtiğimiz birinci motor konfigürasyonumuz: L1050
|
Marka: |
Cesaroni |
İsim: |
L1050 |
Sınıf: |
M |
|
Motorun Toplam İtki Değeri (Ns): |
3732 |
|
|
Zaman (s) |
İrtifa (m) |
Hız (m/s) |
|
Fırlatma |
0 |
0 |
0 |
|
Rampa Tepesi |
0,52 |
6 |
25,9 |
|
Burn Out |
3,75 |
376 |
177 |
|
Tepe Noktası |
18,1 |
1500 |
0,55 |
|
Paraşüt Açılması |
18,1 |
1500 |
0,55 |
|
2. Paraşüt Açılması |
68,1 |
600 |
18 |
|
Paraşüt Sonrası |
|
|
7,55 |
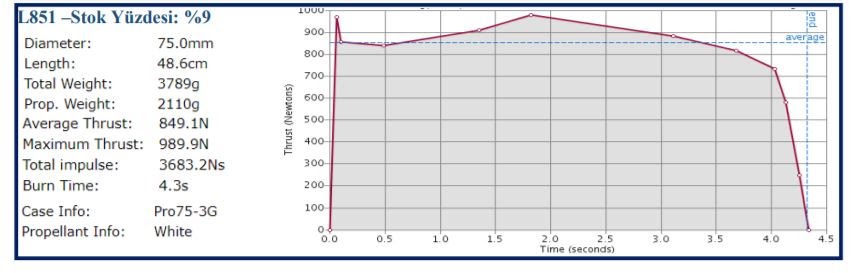
- Roket için seçtiğimiz ikinci motor konfigürasyonumuz: L851
|
Marka : |
Cesaroni |
İsim: |
L851 |
Sınıf: |
M |
|
Motorun Toplam İtki Değeri (Ns): |
3679 |
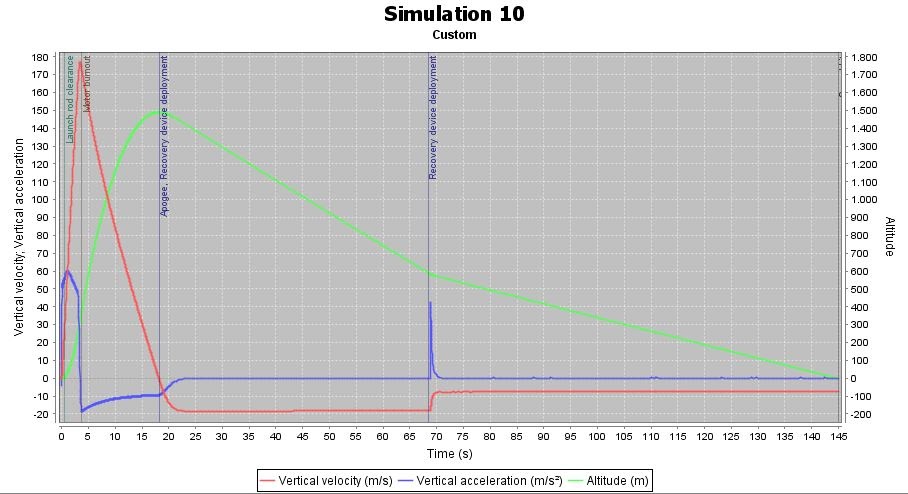
Motor değişikliği yapıldığı takdirde roketin herhangi bir parçası için değişiklik yapılmamaktadır. Aşağıda ikinci motora ait uçuş simülasyonları ve uçuş stabilite değerleri gösterilmektedir.

Gövde kısmının iç çapı, motor çapının iki katı ölçüsüne yakındır. Bu durum, motorun gövdeye kolayca sabitlenip kolayca sökülebilmesine olanak sağlamaktadır. Ayrıca seçilen her iki motor da roketi hedeflenen irtifaya çıkarmaktadır.
.png)
Motor tutucu bölme
1.2 Montaj Stratejisi
Öncelikle, kanatçıklar motor tutucu parçaya vidalar ile sabitlenmektir. Ardından motor, motor tutucu elemanının içine yerleştirilerek üst kısımdan sabitlenmektedir. Bu işlem, roketin dışında gerçekleştirilmektedir. Motor tutucu ve motor birlikte itilerek roket gövdesinin içine konumlandırılmaktadır. Son olarak, önceden açılmış deliklerden motor tutucu, roket gövdesine tornavida yardımıyla vidalar ile sabitlenmektedir. Bu sistem kullanılarak kanatçık sabitleme işlemi kolaylaştırılmıştır. Ayrıca kanatçıkların bu şekilde sabitlenmesi kanatçık aerodinamiğine olumlu etki göstermektedir.
.png)
Motor montajını gösteren CAD çizimi
2. YAPISAL
|
Komponent |
Boyutları |
Malzeme |
|
Burun Konisi |
Çap: 170 mm |
Cam fiber |
|
Gövde 1 |
Dış çap: 170mm İç Çap: 166mm Uzunluk: 370mm |
Cam fiber |
|
Gövde 2 |
Dış çap: 170 mm İç Çap: 166mm Uzunluk: 1200mm |
Cam fiber |
|
Aviyonik Panel |
Çap: 166 mm Uzunluk: 266mm |
MDF |
|
Sürüklenme Paraşütü Kurtarma Sistemi |
Çap: 80mm Uzunluk: 150mm |
Kompozit |
|
Ana Parşüt Kurtarma Sistemi |
180x120 mm Uzunluk: 560mm |
Kompozit |
Semruk-2 roketinin parçalarına ait ebatlar.
Gövde parçalarının malzemeleri ve ebatları yukarıda belirtilmiş olduğundan gövdeler için alt başlık açılmamıştır.
.png)
Aviyonik panelin gösterimi
2.1 Burun Konisi
Roket burun konisinin boyu 400 mm'dir. Dış çapı 170 mm, iç çapı 166 mm ebatlarındadır. Duvar et kalınlığı 2 mm'dir.
2.1.1 Burun Konisi Geometrisi
- Burun konisi, geometri olarak Haack formunda olup şekil parametresi 0’a eşit olan Von Karman tercih edilmiştir.
- Sesaltı hızlarda (0-0,8 mach), parabolik ve Von Karman burun konileri tercih edilmektedir. Roketimizin mach hızı 0,53 olup stabilite şartlarımızı Von Karman formu daha iyi sağladığı için Von Karman tercih etdilmiştir. Ayrıca yüzey pürüzlülüğü, düzgün bir eliptik şekil ve minumum sürtünme kuvvetini sağladığı için tercihimiz bu yönde olmuştur.
2.1.2 Burun Konisi Malzemesi
- Burun konisinin malzemesini tecrübemize ve maliyetinin az olmasına dayanarak cam elyafı olarak belirledik.
.png)
Burun konisi teknik resmi
2. 2 Kanatçıklar
PLA; 3D yazıcılarda istediğimiz formu kolayca ve daha ucuz maliyetle verilebilmesi, düşük işleme sıcaklığı, daha pürüzsüz yüzey çıktısı alınabilme ve çevreye zehirli gaz vermeme gibi özelliklerinden dolayı tercih edilmiştir. PLA uçuş için gerekli mukavemeti yeterince sağlamaktadır. Bu testler, CFD programlarında kontrol edilmiş ve malzeme yeterliliği konusunda tatmin edici sonuçlar vermiştir.
|
Çekme Mukavemeti (MPa) |
49,5 |
|
Eğilme Mukavemeti (MPa) |
103 |
|
Yoğunluk (g/cm3) |
1,04 |
|
Elastiklik Modülü (GPa) |
1,77 |
.png)
Kanatçığın CAD görüntüsü
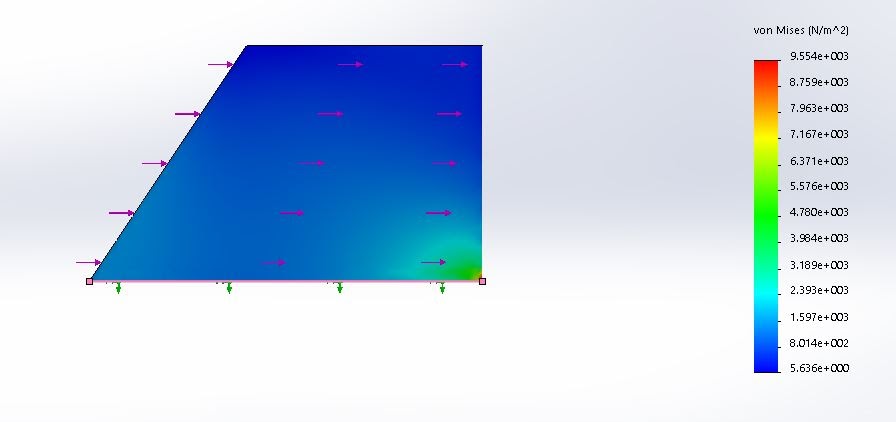
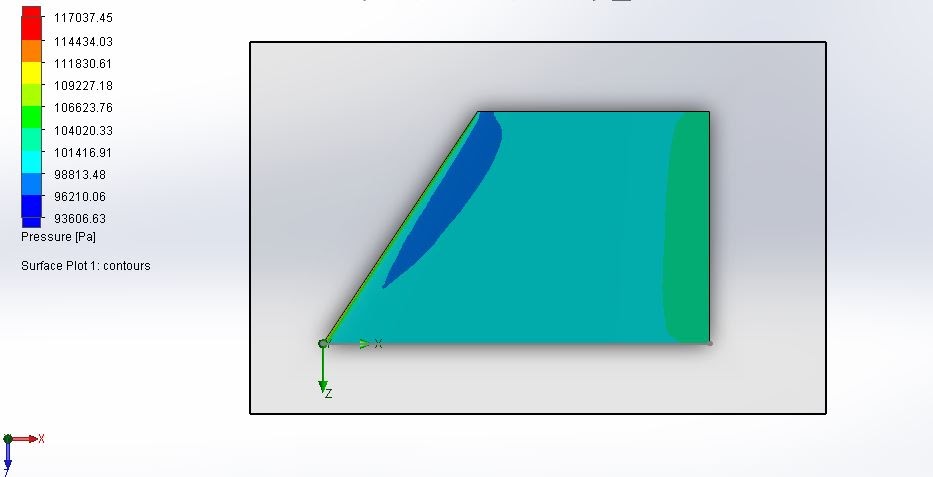

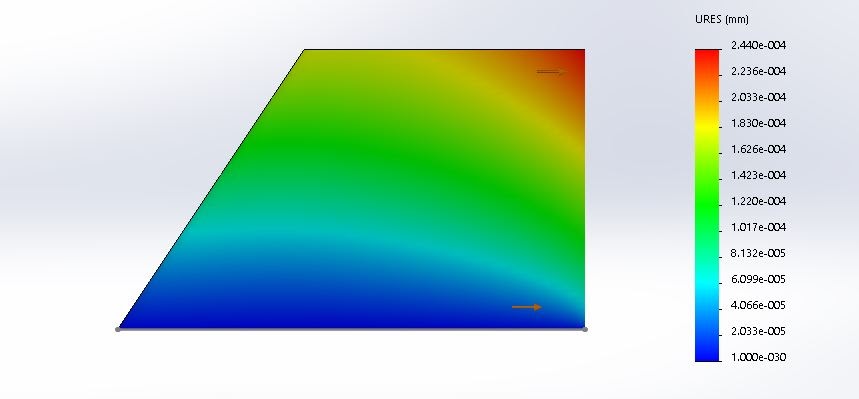
Kanatçığın mukavemet analizleri
Analizlerde roket maksimum hıza ulaştığı anda, kanatçıkta oluşan gerilmeler ve yer değiştirme görülebilmektedir. Maksimum hızın oluşturduğu kuvvet, basınç farkı oluşmadığı için oldukça az ve bundan dolayı malzeme dayanım sınırının oldukça altında kalmaktadır. PLA; kontrol edilen parametrelerde, oldukça sağlam olduğu analizlerden tespit edilmiştir. Kanatçıklar, PLA filamentinden 3D yazıcıda üretilmiştir.
3. KURTARMA
Kurtarma sistemini iki temel hat üzerinde anlatmak mantıklı olacaktır. Birinci hat, burun konisinin ayrılma işlemidir. Burun konisi, omuz kısımlarından gövdeye doğru uzanan sabitleme çubukları ile gövdeye, sabit bir halde bulunan solenoid bobin sayesinde kilitlenmektedir. Roket, zirve noktasına ulaştığında bobine akım gönderilir. Bu işlem neticesinde sabitleme diski içerisindeki yay, kilidin çözülmesini sağlar ve ayrılma işlemi gerçekleştirilir. Burun konisi açıldıktan sonra gövdenin üst kısmına yerleştirilen faydalı yük burun konisinin içindeki paraşütün ayrılmasını sağlamaktadır. Ayrılan paraşüt açıldıktan sonra aynı vazifeyi görüp faydalı yükün gövdedeki yuvasından çıkarak ayrılmasını sağlamaktadır. Nihayetinde burun konisi ve faydalı yük gövdeden ayrı bir şekilde yere iniş sağlamaktadır. Faydalı yükün bulunduğu yuvadan çıkmasının ardından altında bulunan sürüklenme paraşütü yay vasıtası ile gövde dışına çıkarılmaktadır.
İkinci hat, ana paraşütün gövde dışına çıkarılması işlemidir. Ana paraşüt açılma mekanizması olarak yan kapak sistemi tercih edilmiştir. Roket inişte 600 m irtifaya geldiğinde ise ana paraşüt açılmaktadır. Kurtulan kapak, paraşüt haznesinde; paraşütün yerleştirildiği bölmenin altındaki yay sayesinde fırlatma ve gövdenin dışına çıkarma işlemi gerçekleştirecektir. Böylelikle roketin 9 m/s hızın altında yere indirilme vazifesi yerine getirilmektedir.
.png)
Sürüklenme paraşütü ve faydalı yük ayrılma sistemi
.png)
Paraşüt haznesi
.png)
Yan kapak kilit mekanizması
4. AVİYONİK
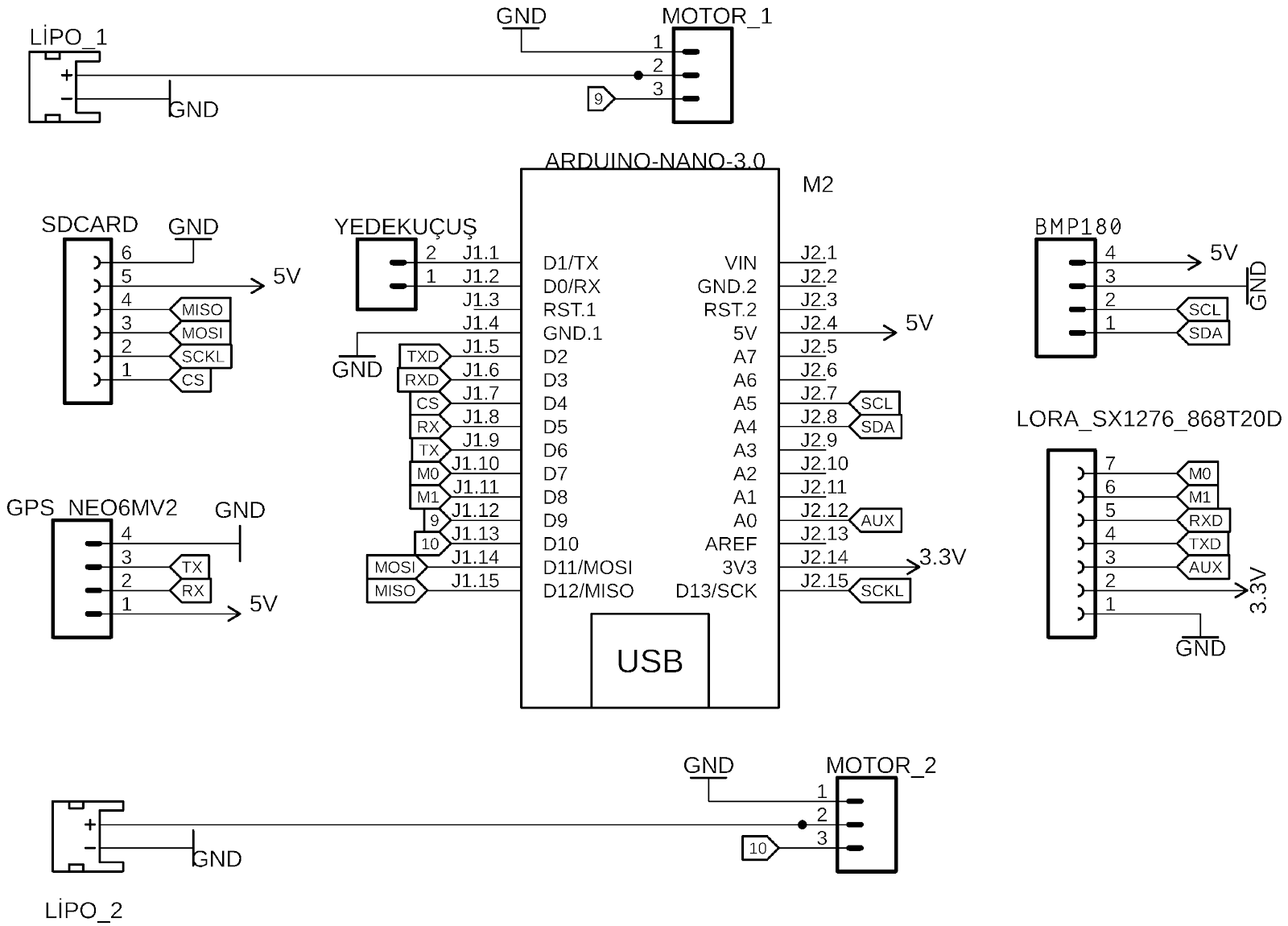
Roket üzerinde, uçuş kontrolünün sağlanması amacıyla ana ve yedek olmak üzere iki adet uçuş bilgisayarı kullanılmaktadır. Ana uçuş bilgisayarı, ekibimiz tarafından geliştirilmiş uçuş kartını barındıracaktır. Bu kart Arduino (Arduino Nano) tabanlı olup üzerinde barometrik sensör (BMP180), GPS modülü (NEO6MV2), haberleşme modülü (Lora SX1276), SD kart modülü bulundurmaktadır. Yedek uçuş bilgisayarı ise ticari uçuş kartının (RRC 2+) Arduino Nano’ya entegresi ile oluşturulmuştır. İki uçuş bilgisayarı anlık olarak haberleşmektedir.
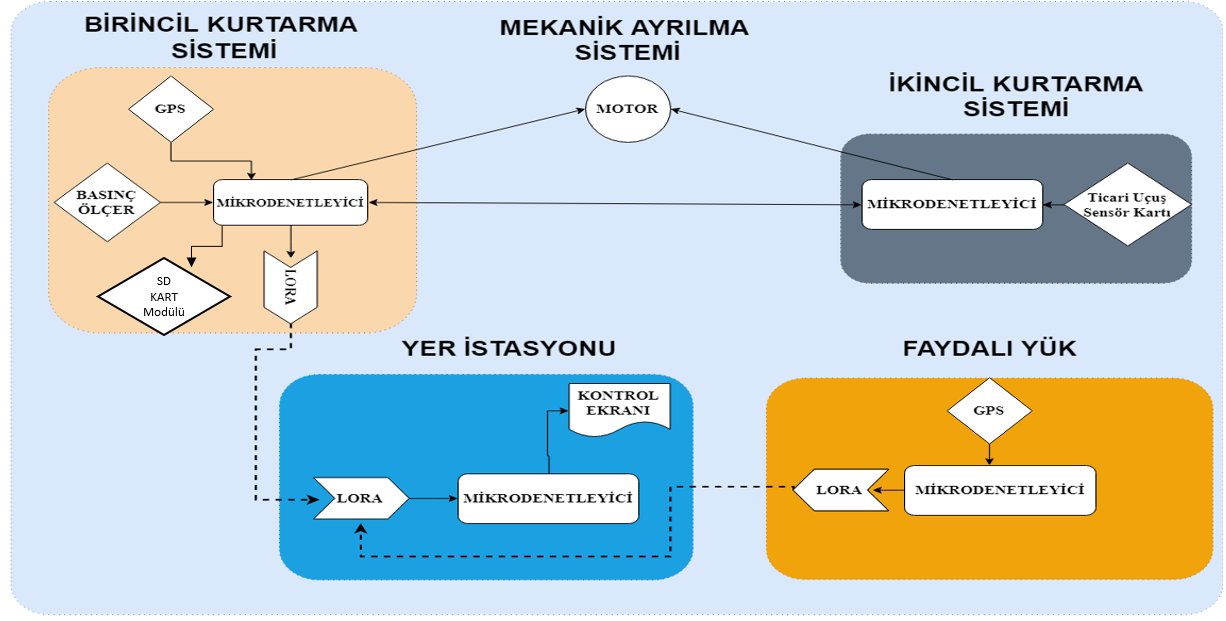
Aviyonik sistem çalışma şeması
Ana Uçuş Bilgisayarı