
STR 02

2018-2019 Akademik Yılı'nda Teknofest Roket Yarışması Yüksek İrtifa kategorisinde Sitare Roket Takımı Yıldız Roket Takımı çatısı altında STR-02 kodlu roketleri ile faaliyet göstermiş, yarışmada Yüksek İrtifa kategorisinde 5. olmuştur.
Teknofest 2019'un ardından ayrı olarak çalışmalarına devam etmekte olan Sitare Roket Takımını takip etmek için aşağıdaki sosyal medya adreslerini kullanılabilirsiniz:
Sitare Roket Takım Instagram adresi: @ytusitare
Sitare Roket Takım Twitter adresi: @ytusitare
Bundan sonraki kısımda STR-02 roketi hakkında teknik bilgi verilecektir.
| STR-02 | M1545 | M2150 |
|---|---|---|
| Boy (metre): | 2,16 | 2,03 |
| Çap (metre): | 0,14 | 0,14 |
| Roketin Kuru Ağırlığı (kg): | 23,315 | 22,271 |
| Yakıt Kütlesi (kg): | 4,835 | 3,969 |
| Motorun Kuru Ağırlığı (kg): | 3,043 | 2,355 |
| Faydalı Yük Ağırlığı (kg): | 4,100 | 4,100 |
| Toplam Kalkış Ağırlığı (kg): | 28,150 | 26,240 |
| İtki Tipi: | Katı | Katı |
| Uçuş Aşamaları | Zaman(s) | İrtifa(m) |
|---|---|---|
| (1) Fırlatma | 0 | 0 |
| (2) Rampa Tepesi | 0,52 | 6 |
| (3) BurnOut | 5,44 | 771 |
| (4) Tepe Noktası | 25,8 | 2975 |
| (5) Paraşüt Açılma (Zirve) | 25,8 | 2975 |
| (6) 2. Paraşütün Açılması | 134,2 | 600 |
| (7) Güvenli İniş | 200 | 0 |
Roket 10 m/s rüzgar hızı ile yatayda yaklaşık olarak 1250 m yol almaktadır.
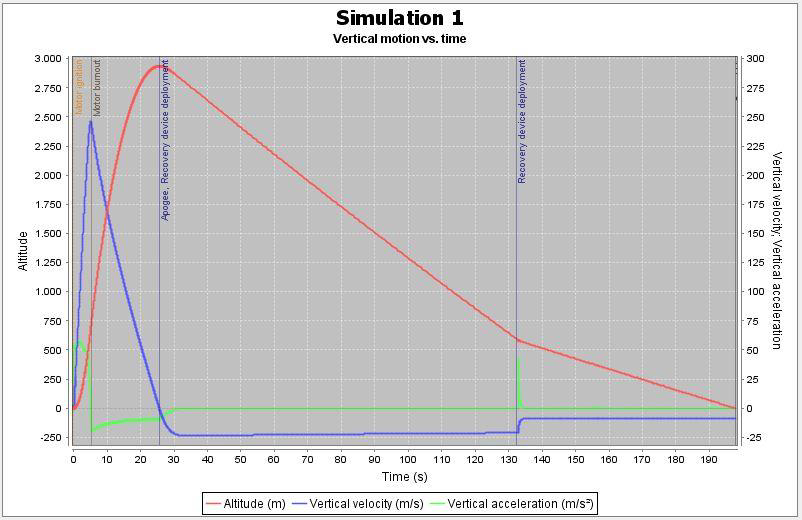
OpenRocket uçuş grafiği
|
STR-02 |
M1545 |
M2150 |
|---|---|---|
|
Kalkış İtki/Ağırlık Oranı: |
5,632 |
8,35 |
|
Rampa Hızı(m/s): |
25,5 |
31,7 |
|
Yanma Boyunca En az Statik Denge Değeri: |
1,94 |
1,83 |
|
En büyük ivme (g): |
5,95 |
9,53 |
|
En Yüksek Hız(m/s & M): |
248 & 0,74 |
259 & 0,77 |
|
Belirlenen İrtifa(m): |
2975 |
2860 |
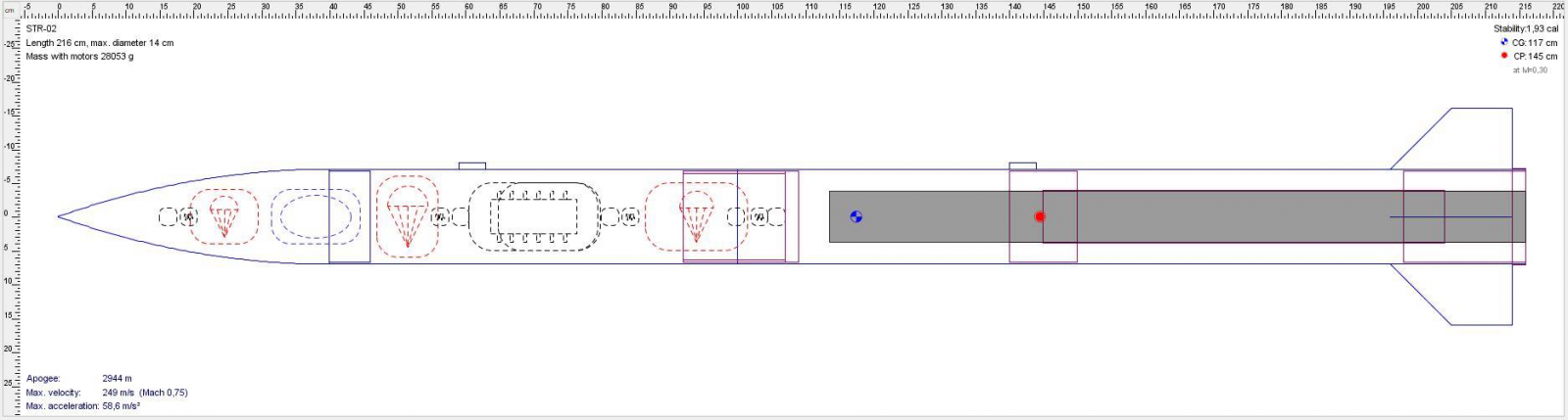
STR-02'nin OpenRocket tasarım görüntüsü
1. YAPISAL
1.1 Burun Konisi
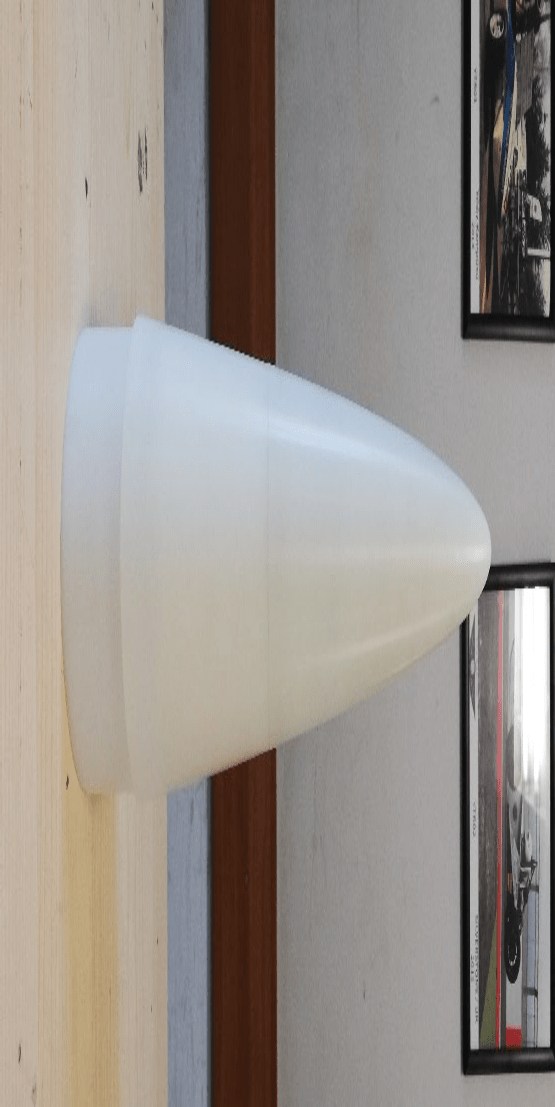
Ekibimiz tarafından yapılan araştırmalara göre subsonik hızlarda gerçekleştirilen uçuşlar için en uygun burun konisi geometrilerinin parabolik veya eliptik formlar olduğu tespit edilmiştir. Subsonik bölgede uçan çoğu model roket için yuvarlatılmış parabolik bir şekil sürüklenmeyi en aza indirmek ve en yüksek irtifaya ulaşmak için idealdir. Bu sebeple parabolik burun konisi tercih edilmiştir. Burun konisinin üretileceği malzeme için 3 temel kriter göz önünde bulundurulmuştur; imalat yöntemi, maliyet ve mekanik özellikler. Düşük maliyetli ve işlenebilir malzemeler arasından hafif ve ucuz oluşundan dolayı PE tercih edilmiştir. Üretim için yapmış olduğumuz görüşmelere göre koni boyutunun tornada işlenebilecek azami parça boyutunu aştığı tespit edilmiştir. Burun konisi iki parçadan oluşacak şekilde imal edilmiştir. Burun konisinin uç ve arka parçası PE çubuktan işlenerek imal edilmiştir. Parçalar CNC tornada işlendikten sonra montajları yapılmış devamında ise burun konisi iskeleti, burun konisine vidalanmıştır.
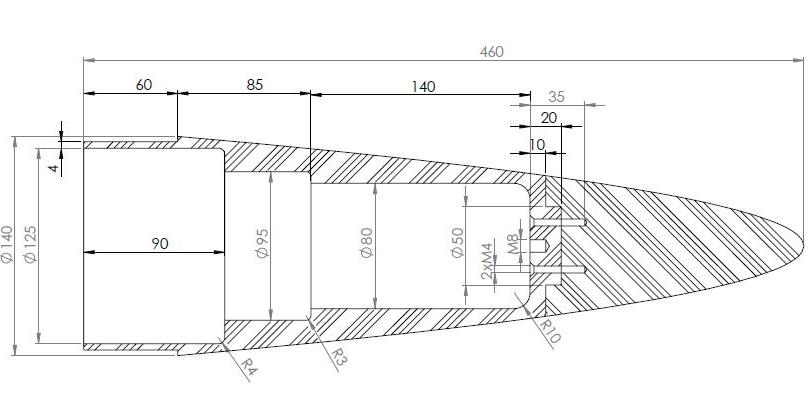
Burun konisinin kesit görünümü ve ölçüleri
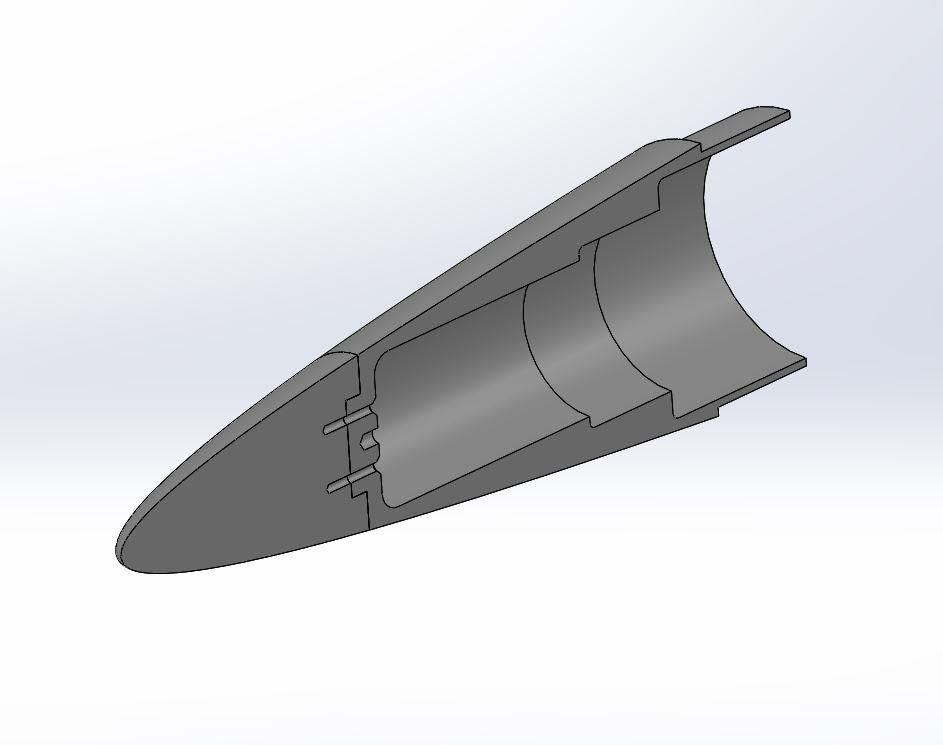
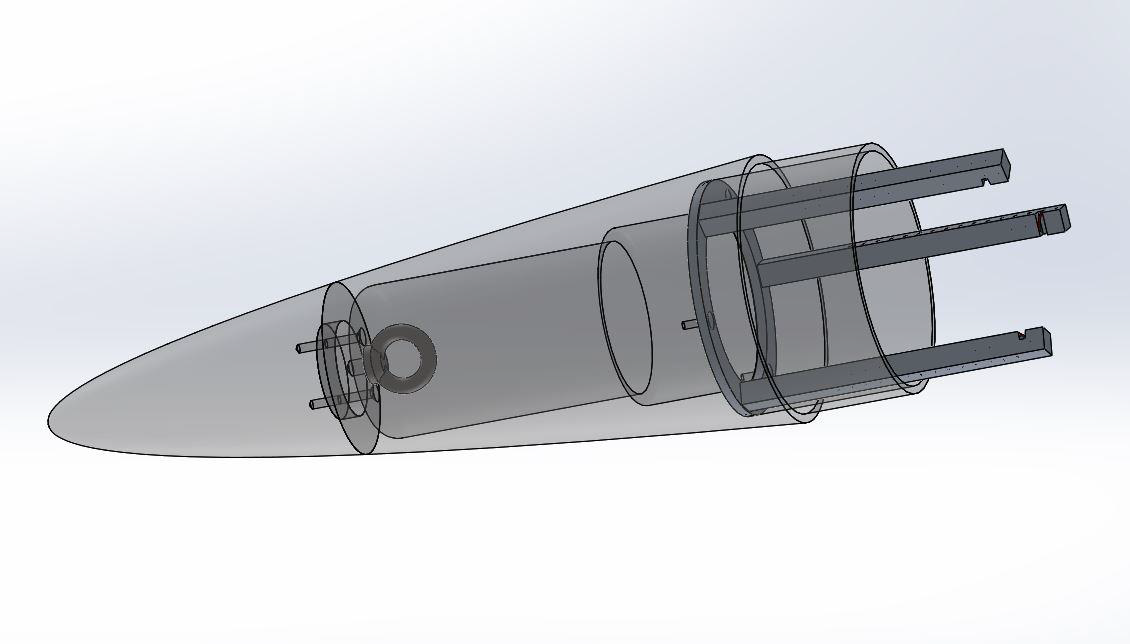
Burun konisinin CAD programındaki kesit gösterimleri
.png)
Üretimi tamamlanmış burun konisi
1.2 Gövde
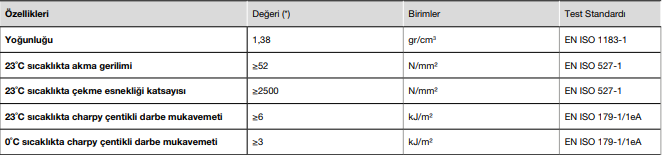
Yapılan analizler doğrultusunda tasarlamış olduğumuz roketin gövdesi için PVC-U malzemesinin mukavemet değerlerinin istenileni karşıladığı tespit edilmiştir. Aynı zamanda elastik olması, aşınmalara ve kimyasallara karşı dayanıklı olması, pürüzsüz yüzeye sahip olması roketimiz için idealdir. Maliyetide diğer malzemelere kıyasla daha düşüktür. Hazır olarak istenilen çaplarda temin edilmesi mümkündür. Aşağıdaki tablo roketin gövdesini satın aldığımız firmanın teknik kataloğundan alınmıştır ve PVC-U’nun mekanik özelliklerini göstermektedir.
Kavramsal tasarım sürecinde 2,8 mm et kalınlığına, 140 mm çapa sahip PN4 boru kullanılması öngörülmüştü ancak yapılan piyasa araştırmalarında bu borunun kataloglarda mevcut olmasına rağmen piyasada bulunmadığı tespit edilmiştir. Bu sebeple gövde 3,5 mm et kalınlığına 140 mm çapa sahip PN6 boruya göre revize edilmiştir.
Entegrasyon Gövdesi için PVC-U malzeme uygun görülmüştür. Entegrasyon gövdesi boyu istenildiği gibi gövdenin bir buçuk katı değildir. Modüllerin birbirine bağlantılarının sabitliğinin bir sonraki sayfada ve kurtarma sisteminde detaylı olarak anlatılan iskelet yapısı ile sağlanacağı öngörüldüğü için bu durumun sorun teşkil ettiği düşünülmemektedir.
1.3 Kanatçıklar
Kanatçık geometrileri arasında eliptik kanatçık tipi, teoride en az sürtünmeye maruz kalan kanatçık tipidir. Ancak kusursuz üretim gerektiren bu geometrinin oluşturulması oldukça güçtür. Eliptik kanatçık tipi ile kıyaslandığında yaklaşık sonuçlar dik yamuk geometrisiyle de elde edilebilir ve bu geometride kanatçık üretimi çok daha kolay yapılabilmektedir. Bu sebeple dik yamuk geometrisi kullanılmıştır.
Kanatçık yapısı olarak gözyaşı damlasına benzer bir yapı öngörülmüştür. Airfoil yapı, havanın kanatçık üzerinde daha kolay akışını ve aynı zamanda kararlı bir uçuş yapmasını sağlar. Ancak firar kenarı roket dinamiğinde çok az bir etkiye sahip olduğu için herhangi bir darbe anında zarar görmemesi açısından dikdörtgen olarak tasarlanmıştır. Kanatçıklar uygun geometride 3D yazıcı yardımıyla üretilmiştir. Üretilen kanatçıkların pürüzlü yüzeyleri zımpara ile temizlenmiştir.
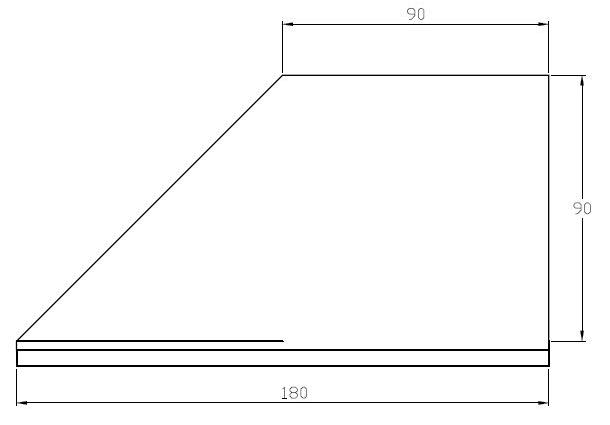
Kanatçığın yan kesit görünümü ve ebatları
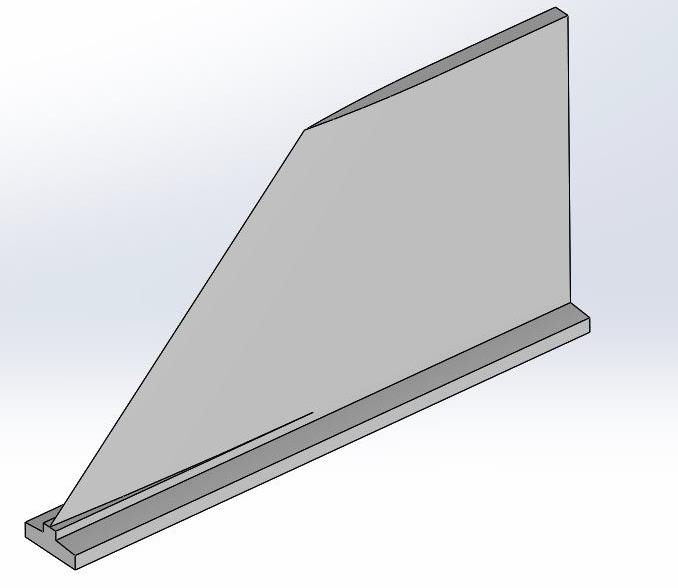
Kanatçığın CAD programındaki kesit gösterimi
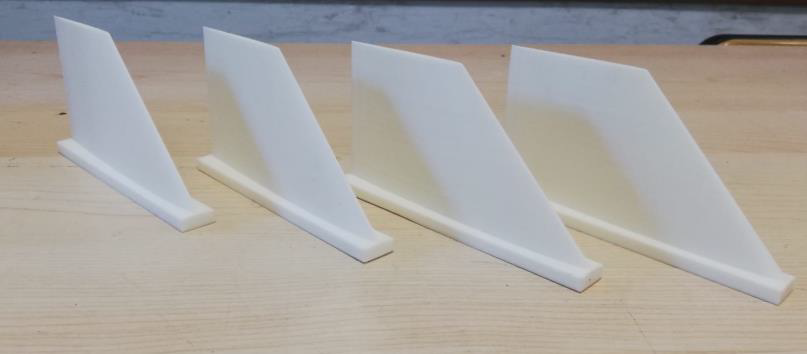
Üretilen kanatçıklarımız
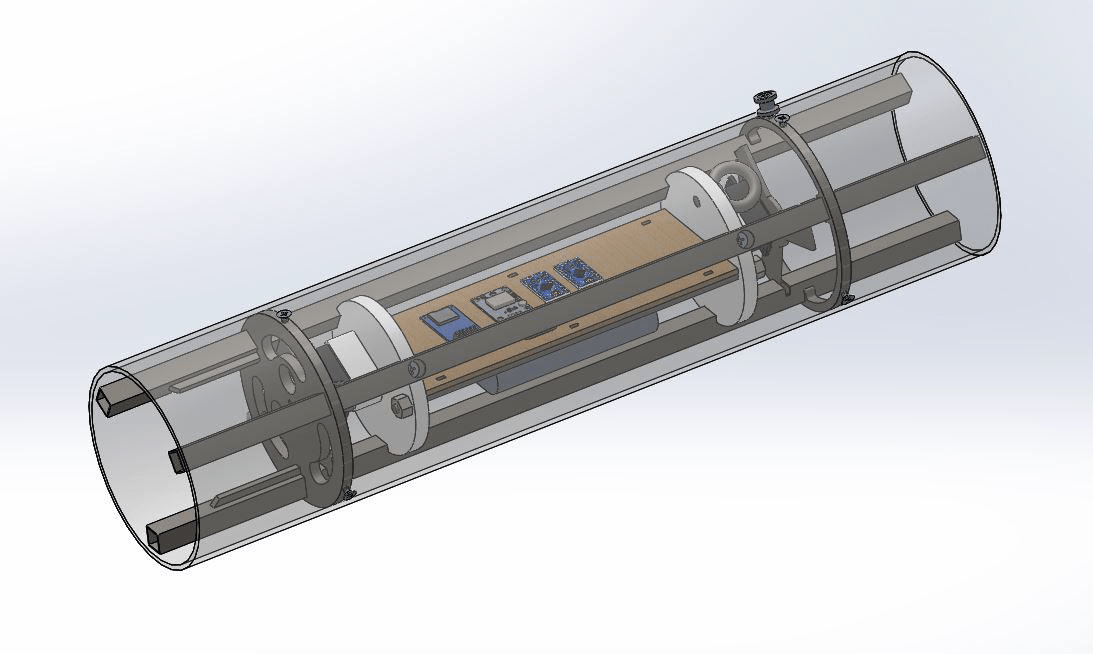
1.4 Gövde İçi Yapısal Destekler
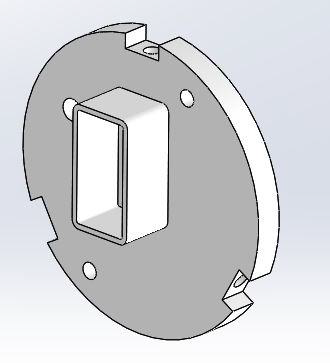
Aviyonik iç destek
1.5 İskelet
STR-02’ nin ana yapısı iskelet şeklinde tasarlanmıştır. Tüm diğer iç ve dış yapılar bu iskelet sistemi üzerine montajlanarak daha modüler bir tasarım elde edilmiştir. Bu iskelet yapısı temelde kare profiller ve profillerin sabitliğini sağlayacak halkalardan oluşturulmuştur.
Kurulan iskelet diğer alt sistemler için bir kızak görevi görecek şekilde tasarlanmıştır. Böylece her bir sistem iskelet üzerine monte edilebilecek ve gövdeden bağımsız kalacaktır. Bu sistemin yapılmasındaki en büyük amaç gövdeyi bir kılıf gibi kullanıp alt sistemlere herhangi bir müdahale için sadece gövdeyi iskeletten uzaklaştırmanın yeterli olmasını sağlamaktır. İskelet 2 ayrı alt parçadan meydana gelmektedir; alüminyum profiller ve bu profillerin sabitleneceği alüminyum halka. Punch makinesi ile üretim daha kolay ve daha az maliyetli olduğundan parça punch makinesi ile üretilmiştir. Alüminyum profillerin çentikleri ve delikleri freze ile açılmıştır. Üretilen halka ve işlem gören profiller argon kaynağı ile birleştirilerek burun konisi iskeletinin üretimi tamamlanmıştır.
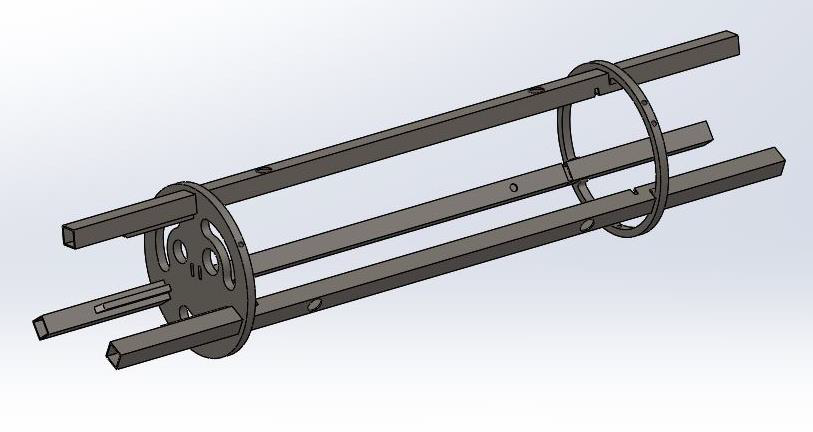
Ana iskeletin CAD programındaki kesit gösterimi
1.6 Motor Modülü
Motor bloğu ve motor yatağı için çelik; merkezleme halkası ve kanatçık yatağı için ise polietilen malzeme kullanılması uygun bulunmuştur. Bu malzemelerin seçilmesindeki ilk neden tasarlanan roketin her iki motor için de en uygun mach sayısını, statik marjini ve hedef irtifa değerlerini sağlamasıdır. Ayrıca seçilen malzemelerin piyasada bulunmasının kolaylığı, maliyeti ve üretim kolaylığı göz önüne alınmıştır. Düşük iç gerilime sahip polietilenin torna, freze gibi talaşlı imalat yöntemleri ile şekillendirilmesi kolaydır.
Motor bloğu bölgesi
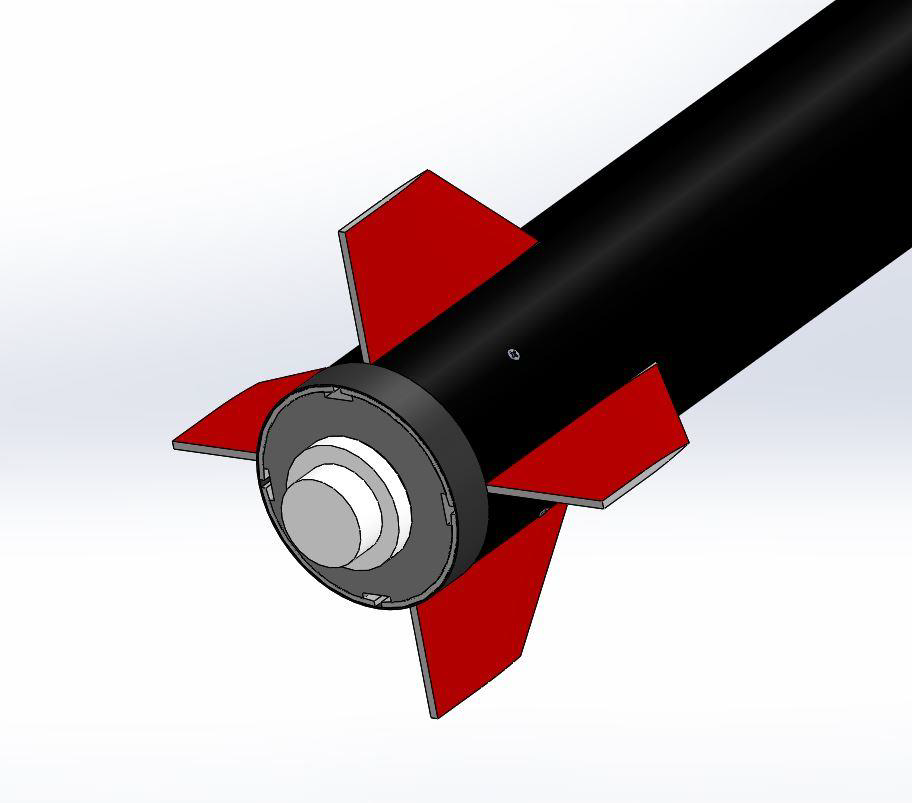
Kanatçık bölgesi
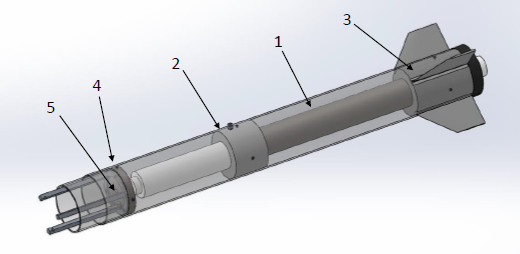
Rokete yerleştirilecek olan motorun roket içinde merkezlenmesi ve titreşiminin önlenmesi amacıyla motor yatağı (1) kullanılmaktadır. Bu yatağın roket içinde sabitlenmesi merkezleme halkası (2) ve kanatçık yatağı (3) kullanılarak sağlanmaktadır. Motorun dikey yönde hareketini engellemek için blok (4) kullanılmıştır. Motor, bu bloğa cıvata (5) yardımıyla sabitlenmekktedir. Böylece motorun roket içinde sabit kalması sağlanmaktadır.
2 mm kalınlığa sahip sac öncelikle silindir yardımıyla daire haline getirilmiş, oluşturulan daire kaynakla birleştirilmiştir.
2. KURTARMA
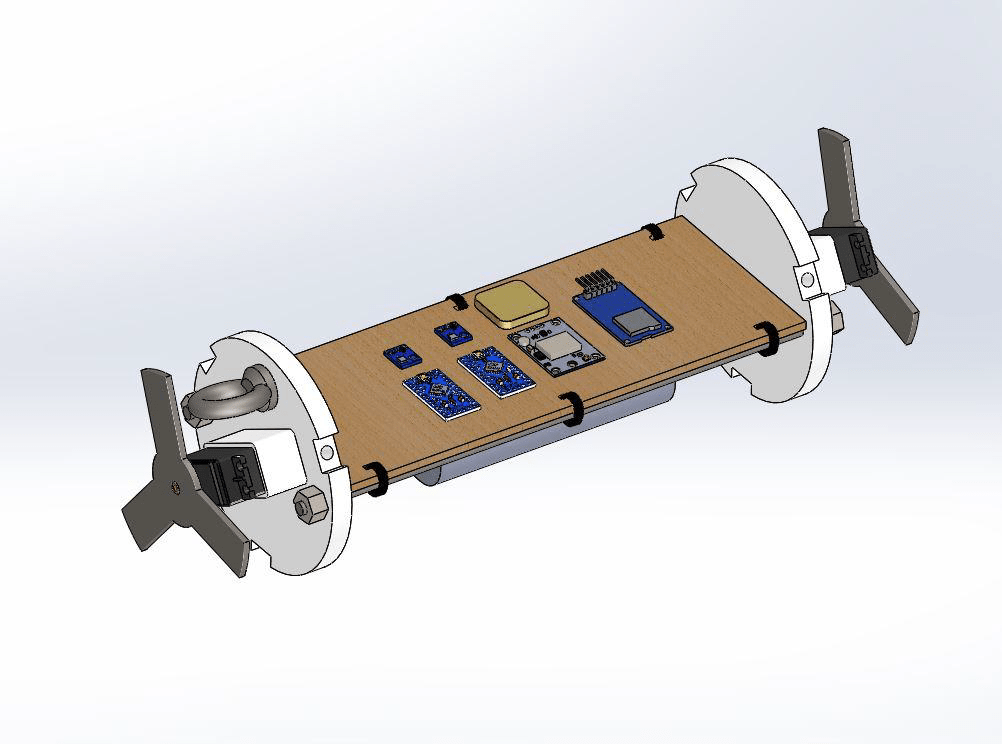
Aviyonik sistem ve uçuş bilgisayarı
2.1 Paraşütler
STR02 roketinin kurtarma stratejisinin temelinde paraşütler bulunmaktadır. Roketin güvenli inişi paraşütler ile sağlanmaktadır. Burun konisi, yük modülü, motor modülü olmak üzere üç bölümden oluşan roketimizde burun konisi ve faydalı yük; yük modülü ve motor modülü birlikte kurtarılmaktadır.
- Burun konisi ile faydalı yükün toplam ağırlığı 6 kilogram olmakla beraber, yere iniş hızları 8 m/s olarak hedeflenmiştir.
- Roket, fırlatma rampasında 28 kilogram ağırlığa sahip olup, yakıtın tamamının yanması ile birlikte 24 kilograma kadar düşmektedir. Faydalı yükün ve burun konisinin toplam kütlesi 6 kilogramdır ve roketten bağımsız şekilde kurtarılmaktadır. Böylece kurtarma esnasında roketin kütlesi yaklaşık 18 kilogram olmaktadır. İki aşamalı paraşüt açma yöntemi ile kurtarılmakta olan gövdenin yere iniş hızı 8.5 m/s olarak hedeflenmiştir.
- Paraşüt iplerinin boyu paraşüt çapının 1,15 katı alınarak hesaplanmıştır.
- Yukarıda belirtilen değerler gözönüne alınarak gerekli paraşüt çapları ve ip uzunlukları hesaplanmış ve tabloda verilmiştir.
- Paraşüt kumaşı olarak ripstop nylon, paraşüt ipi olarak parakord ip kullanılmıştır.
- Roketin şok kordonu parakord ip olup roketin boyunun beş katıdır.
|
|
Faydalı Yük Paraşütü |
Sürüklenme Paraşütü |
Ana Paraşüt |
|
Çap |
160 cm |
125 cm |
260 cm |
|
Malzeme |
Ripstop nylon |
Ripstop nylon |
Ripstop nylon |
|
Renk |
Sarı |
Sarı |
Sarı |
|
İp Boyu |
190 cm |
150 cm |
300 cm |
2.2 Kurtarma Mekanizması
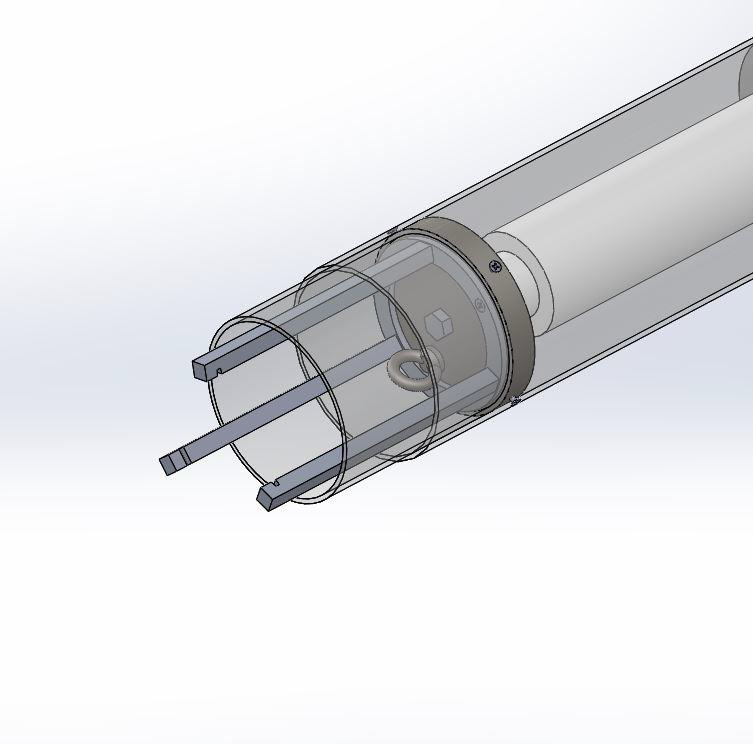
Roketin tasarımında kullanılmış olan metal profiller kurtarma sisteminin ana parçası olmakla beraber hem montaj kolaylığı sağlamış hem de roketin rijitliğini arttırmıştır. Bu sistemdeki profiller kurtarma sisteminde yer aldığı gibi roketin bütünleştirilmesinde de önemli bir rol oynamaktadır.
- Kavramsal tasarım sürecinde kurtarma sistemi aktivasyonu için güvenilir ve güçlü bir sistem olan yay itmeli sistem kullanılmıştır. Ayrıca bu sistem ile roket modüllerinin ve burun konisinin birbirine kilitlenmesi sağlanmaktadır.
- Yay itmeli sistem temel olarak profiller, yaylar ve bu yayların kontrolünü sağlayan servo motorlardan oluşmaktadır. Yayların sıkıştırılması ile depolanan enerjinin tepe noktasında, aviyonik sistemden gelen komutun burun konisine aktarılması ile birincil açılma sağlamaktadır. Aynı prensip ile gövde modüllerinin birbirinden ayrılması sağlanarak ikincil açılma aktifleştirilmektedir. Ayrıca bu sistemde var olan metal profiller kurtarma sistemini oluşturmanın yanında hem montaj kolaylığı sağlamakta hem de roketin rijitliğini arttırmaktadır.
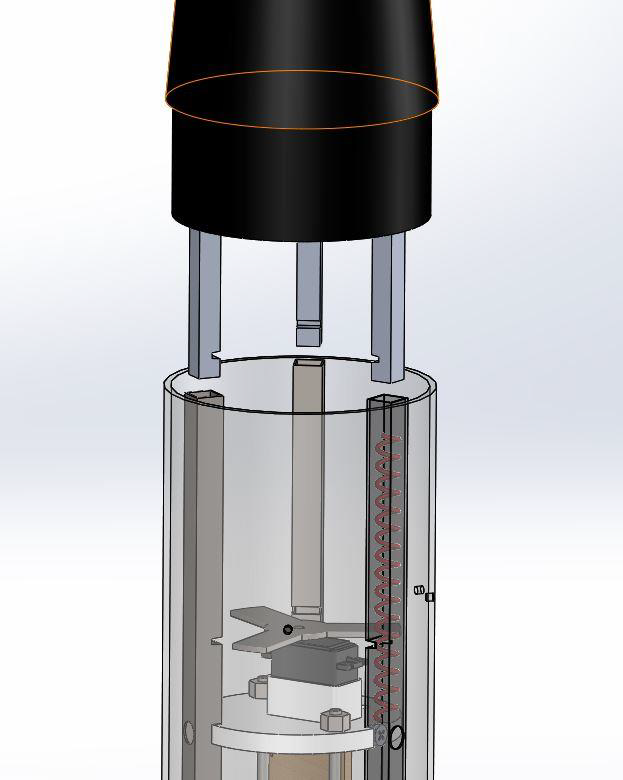
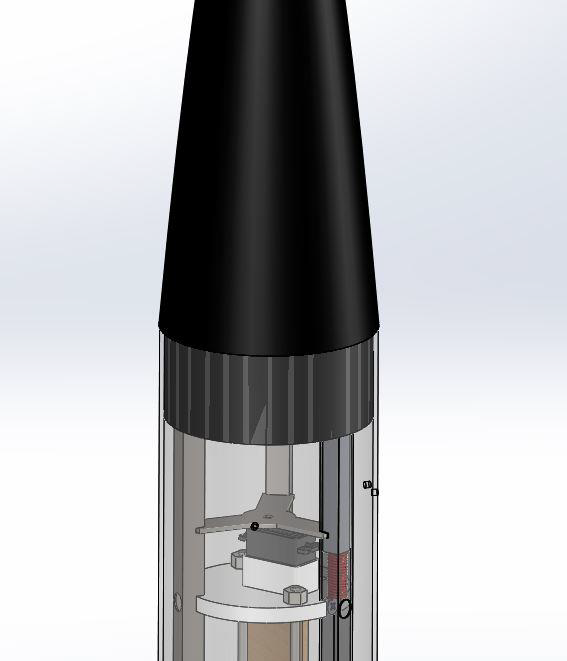
Kurtarma mekanizmasının CAD gösterimi
3. AVİYONİK
Roket üzerinde uçuş kontrolünün sağlanması amacıyla ana ve yedek olmak üzere iki adet uçuş bilgisayarı kullanılmıştır. Ana uçuş bilgisayarı, ekibimiz tarafından oluşturulmuş uçuş kartını barındırmaktadır. Bu kart Arduino (Arduino Nano) tabanlı olup üzerinde barometrik sensör (BMP180), GPS modülü (NEO6MV2), haberleşme modülü (LoraSX1276) ve SD kart modülü bulundurmaktadır. Yedek uçuş bilgisayarı ise ticari uçuş kartının (RRC2+) Arduino Nano’ya entegresi ile oluşturulmuştur. İki uçuş bilgisayarı anlık olarak haberleşebilmektedir.
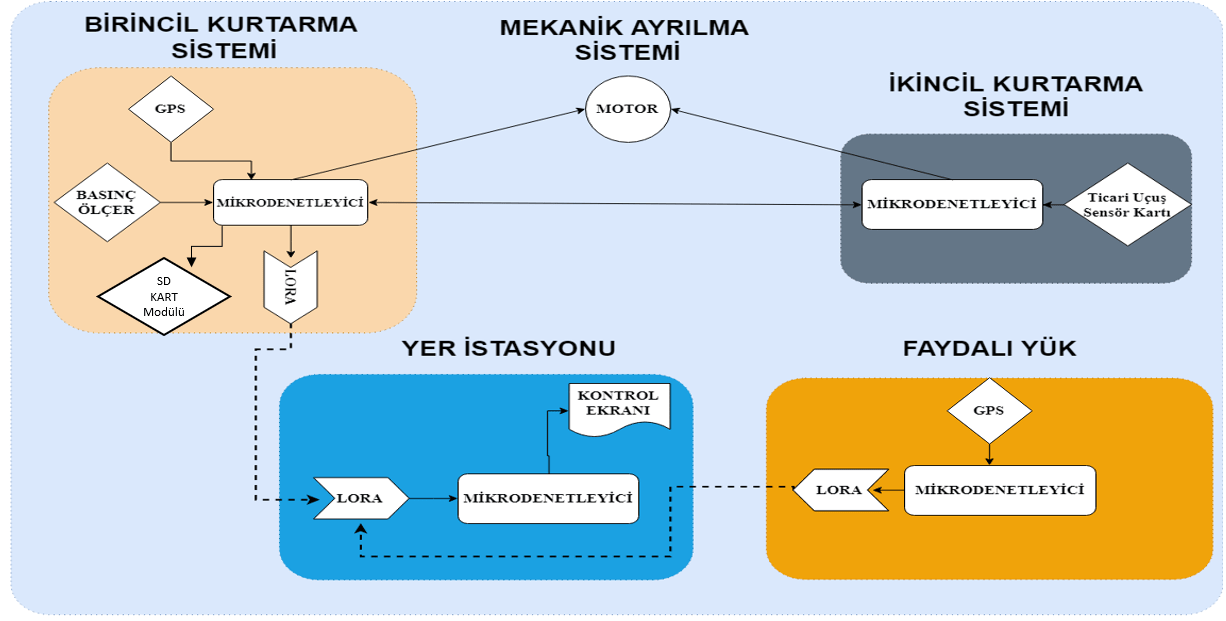
Aviyonik sistem çalışma şeması
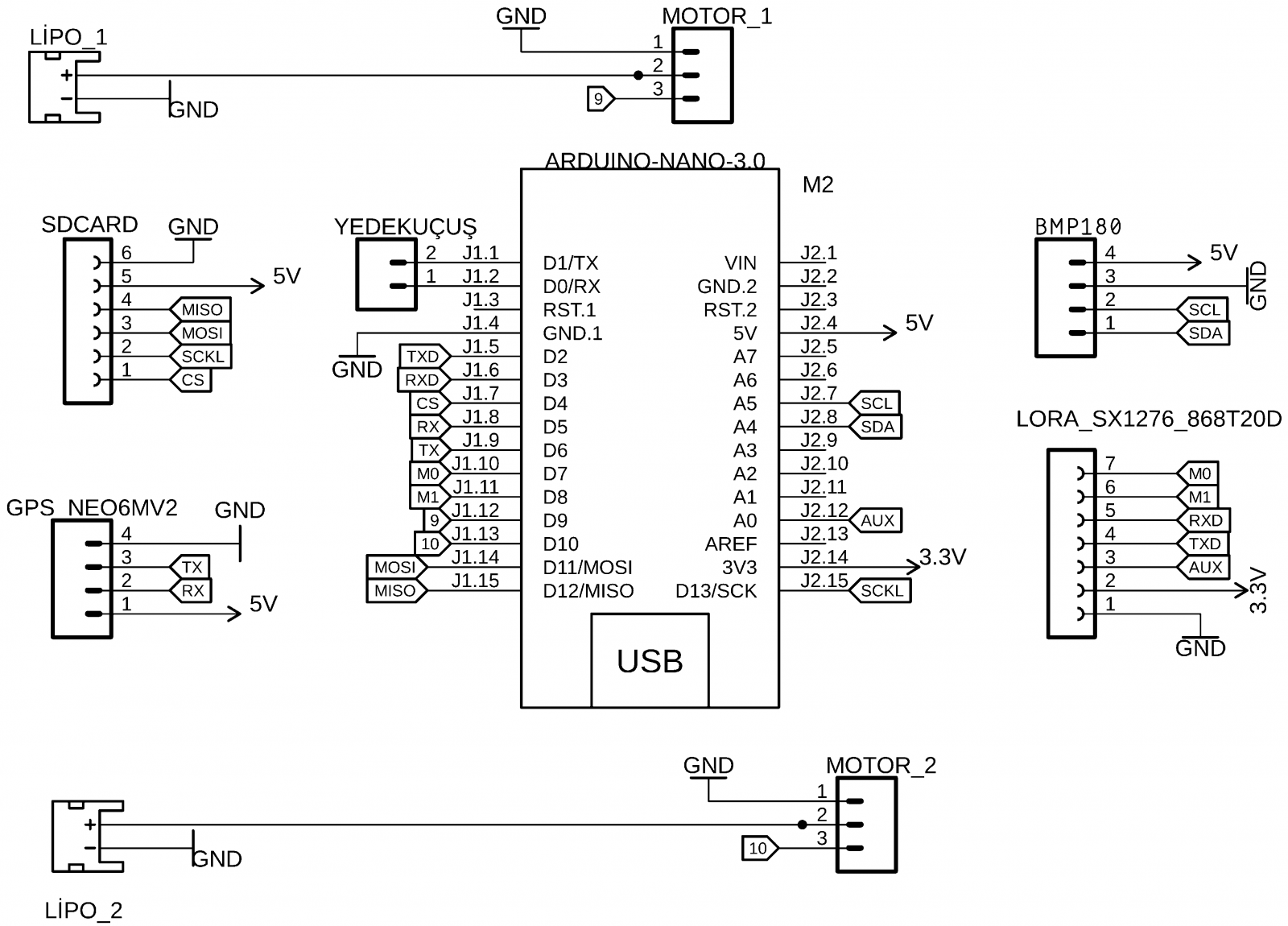
Ana uçuş bilgisayarı şeması